陳猛1��,董岱2,逄鵬博3����,梁健民1��,胡穎瑜1,李松晶4�,*
(1.震德塑料機(jī)械有限公司���,廣東佛山528300;2.南京工業(yè)職業(yè)技術(shù)機(jī)械工程學(xué)院����,江蘇南京210023;3.震雄機(jī)械(深圳)有限公司�,廣東深圳518122;4.哈爾濱工業(yè)大學(xué)機(jī)電工程學(xué)院���,黑龍江哈爾濱150006)
摘要:在全面推進(jìn)制造業(yè)信息化和智能化的背景下�����,針對(duì)注塑產(chǎn)業(yè)離散制造現(xiàn)狀����,開(kāi)展注塑離散制造過(guò)程的自主感知與控制關(guān)鍵技術(shù)研究。本文對(duì)注塑裝備各功能模塊的工藝結(jié)構(gòu)進(jìn)行升級(jí)改造����,研究大數(shù)據(jù)運(yùn)行過(guò)程關(guān)鍵數(shù)據(jù)的自主感知�����、缺陷在線采集和智能識(shí)別���、生產(chǎn)任務(wù)自組織調(diào)度�、裝備智能控制策略自適應(yīng)調(diào)整和裝備上云智能化管理平臺(tái)���,實(shí)現(xiàn)生產(chǎn)過(guò)程智能化監(jiān)控、管理�、服務(wù)和維護(hù)的注塑全新工藝����,助力大型企業(yè)注塑車間無(wú)人化作業(yè)實(shí)現(xiàn)���,提高下游產(chǎn)業(yè)注塑產(chǎn)品質(zhì)量�,實(shí)現(xiàn)塑機(jī)裝備產(chǎn)品的智能化提升��。
關(guān)鍵詞:注塑產(chǎn)業(yè);離散制造;智能感知;數(shù)據(jù)分析和優(yōu)化;智能控制
制造業(yè)是國(guó)民經(jīng)濟(jì)的物質(zhì)基礎(chǔ)和產(chǎn)業(yè)主體,是衡量國(guó)民經(jīng)濟(jì)發(fā)展的重要標(biāo)志。注塑制造業(yè)作為現(xiàn)代社會(huì)中工業(yè)發(fā)展不可或缺的部分����,注塑工業(yè)的發(fā)展水平在一定程度上也代表了一個(gè)國(guó)家的工業(yè)發(fā)展水平���。注塑行業(yè)作為離散型制造的典型代表����,其產(chǎn)品在計(jì)算機(jī)、家電��、通信電子、醫(yī)療和汽車等領(lǐng)域的應(yīng)用范圍巨大�。隨著《中國(guó)制造2025》的頒布�,我國(guó)開(kāi)始全面推進(jìn)制造業(yè)和信息技術(shù)的高度融合�����,以使企業(yè)制造過(guò)程更加信息化和智能化[1-3]。
隨著技術(shù)的發(fā)展,以高精度化����、全自動(dòng)化、網(wǎng)絡(luò)化��、一體化與復(fù)合化為特征的注塑機(jī)智能化發(fā)展要求日趨緊迫,國(guó)內(nèi)外注塑機(jī)系統(tǒng)在物聯(lián)網(wǎng)、大數(shù)據(jù)���、云制造發(fā)展背景下,紛紛加速智能化進(jìn)程���。目前國(guó)內(nèi)注塑機(jī)大部分控制系統(tǒng)實(shí)時(shí)性差����、速度慢�����、控制精度不高、開(kāi)發(fā)周期長(zhǎng)��、保養(yǎng)維護(hù)升級(jí)困難��。國(guó)內(nèi)注塑機(jī)品牌型號(hào)眾多,生產(chǎn)實(shí)時(shí)數(shù)據(jù)難以采集��、信息斷層,設(shè)備利用效率難以有效提高[4-5]�。生產(chǎn)過(guò)程監(jiān)控困難���,仍通過(guò)傳統(tǒng)注塑加工和控制工藝改造實(shí)現(xiàn)節(jié)能降耗�����,注塑機(jī)離散制造過(guò)程的智能控制和管理方面的研究還較少�。
因此,本文提出對(duì)注塑離散制造過(guò)程的自主感知與控制關(guān)鍵技術(shù)進(jìn)行研究�����,將離散制造人工智能系統(tǒng)引入注塑行業(yè)�,對(duì)注塑裝備各功能模塊的工藝結(jié)構(gòu)進(jìn)行升級(jí)改造,研究大數(shù)據(jù)運(yùn)行過(guò)程關(guān)鍵數(shù)據(jù)的自主感知�、缺陷在線采集和智能識(shí)別���、生產(chǎn)任務(wù)自組織調(diào)度�����、裝備智能控制策略自適應(yīng)調(diào)整和裝備上云智能化管理平臺(tái),實(shí)現(xiàn)生產(chǎn)過(guò)程智能化監(jiān)控��、管理、服務(wù)和維護(hù)的注塑全新工藝��,助力大型企業(yè)注塑車間實(shí)現(xiàn)無(wú)人化作業(yè),提高下游產(chǎn)業(yè)注塑產(chǎn)品質(zhì)量�,實(shí)現(xiàn)塑機(jī)裝備產(chǎn)品的智能化提升��。
1 注塑機(jī)離散制造智能感知及控制系統(tǒng)構(gòu)建
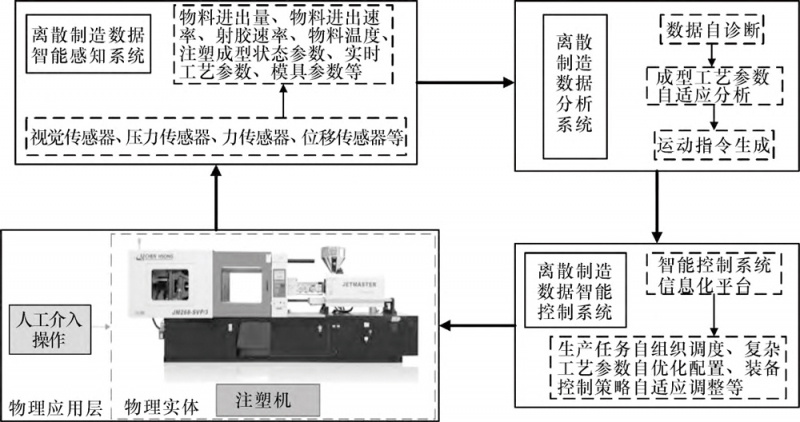
傳統(tǒng)注塑制造是典型的離散制造系統(tǒng)�����,為實(shí)現(xiàn)注塑制造過(guò)程的智能感知和控制,需對(duì)其進(jìn)行改造升級(jí)����。本文根據(jù)注塑行業(yè)智能化發(fā)展要求�����,提出的注塑離散制造過(guò)程智能感知與控制系統(tǒng)總體方案如圖1所示。首先���,該系統(tǒng)提升了注塑裝備的自動(dòng)化智能化性能���。其次,為實(shí)現(xiàn)該系統(tǒng)功能����,搭建了統(tǒng)一信息化平臺(tái)��,實(shí)現(xiàn)運(yùn)行過(guò)程關(guān)鍵數(shù)據(jù)的自主感知����、缺陷在線采集����、精準(zhǔn)定位和智能識(shí)別��。另外將CPS系統(tǒng)數(shù)據(jù)集成分析建模���,研究成型工藝與參數(shù)自適應(yīng)方法�����。進(jìn)而搭建注塑產(chǎn)業(yè)多類型生產(chǎn)任務(wù)自組織調(diào)度��、裝備智能控制策略自適應(yīng)調(diào)整和裝備上云智能化管理平臺(tái)。最后�,建成了生產(chǎn)過(guò)程任務(wù)組織調(diào)度及參數(shù)優(yōu)化配置決策等功能的注塑行業(yè)人工智能工業(yè)服務(wù)系統(tǒng)���。
圖1注塑機(jī)離散制造智能感知及控制系統(tǒng)
本文注塑機(jī)系統(tǒng)的智能化感知及控制系統(tǒng)構(gòu)建重點(diǎn)研究以下幾個(gè)部分:注塑機(jī)本體��、鎖模機(jī)構(gòu)、射膠機(jī)構(gòu)����、動(dòng)力系統(tǒng)�、控制系統(tǒng)����、塑化系統(tǒng)和網(wǎng)絡(luò)通信系統(tǒng)�����。鎖模機(jī)構(gòu)是注塑離散制造裝備系統(tǒng)的關(guān)鍵部件���,采用有限元應(yīng)力分析設(shè)計(jì)優(yōu)化高剛性鎖模部分,設(shè)計(jì)可調(diào)試滑板承托移動(dòng)模板���,鍍硬鉻高拉力鋼連接柱���,實(shí)現(xiàn)自動(dòng)模厚及鎖模力調(diào)整���。射膠機(jī)構(gòu)利用高精度傳 感器、溫控算法和高扭矩液壓馬達(dá)�����,從而達(dá)到減少漏料���、提高精度,縮短熔膠時(shí)間的目的。動(dòng)力系統(tǒng)通過(guò)優(yōu)化液壓動(dòng)力裝置和伺服驅(qū)動(dòng)系統(tǒng)���,實(shí)現(xiàn)精確的壓力和流量控制����,提高注塑機(jī)的工作性能和制件的精度�����?��?刂葡到y(tǒng)采用Ai-12高級(jí)智能計(jì)算機(jī)控制器,能提供分段開(kāi)模�����、閉模和多段熔膠設(shè)置����,幫助用戶達(dá)到最佳熔膠效果��。塑化系統(tǒng)零件采用進(jìn)口材料SDK61�,保證其強(qiáng)度和耐磨性����。多種螺桿塑化參數(shù)供選擇�,針對(duì)不同塑料獲得更好的塑化效率和塑化效果�����。網(wǎng)絡(luò)通信 系統(tǒng)采用EthercAT技術(shù),支持IPV4���、IPV6等技術(shù)的工業(yè)互聯(lián)網(wǎng)�,可采集并上傳設(shè)備狀態(tài)��、作業(yè)操作���、環(huán)境情況等數(shù)據(jù)����,并根據(jù)遠(yuǎn)程指令靈活調(diào)整設(shè)備運(yùn)行參數(shù)��?����?勺審S家通過(guò)聯(lián)網(wǎng)實(shí)現(xiàn)遠(yuǎn)程在線監(jiān)控,并向客戶提供運(yùn)行維護(hù)解決方案���。
綜合以上研究成果及技術(shù)集成創(chuàng)新,推出注塑機(jī)MK6e系列產(chǎn)品及MK6.6升級(jí)版產(chǎn)品��,并以MK6.6升級(jí)版注塑機(jī)系統(tǒng)為基礎(chǔ),搭建了離散類產(chǎn)品硬件測(cè)試實(shí)驗(yàn)平臺(tái)進(jìn)行研究��。
2 基于視覺(jué)檢測(cè)技術(shù)注塑件瑕疵實(shí)時(shí)檢測(cè)
本文注塑制造過(guò)程運(yùn)行數(shù)據(jù)的自主感知系統(tǒng)�,包含智能化控制系統(tǒng)����,可與開(kāi)發(fā)的一站式網(wǎng)絡(luò)控制系統(tǒng)、MES系統(tǒng)實(shí)現(xiàn)遠(yuǎn)程連接���,實(shí)現(xiàn)持續(xù)改進(jìn)�。建立了高效���、安全的智能服務(wù)系統(tǒng),提供的服務(wù)能夠與產(chǎn)品形成實(shí)時(shí)�����、有效互動(dòng),大幅度提升嵌入式系統(tǒng)���、移動(dòng)互聯(lián)網(wǎng)、大數(shù)據(jù)分析���、智能決策支持系統(tǒng)的集成應(yīng)用水平�����。主要包括數(shù)據(jù)采集模塊、網(wǎng)絡(luò)傳輸模塊���、數(shù)據(jù)分析模塊、模型構(gòu)建模塊和數(shù)據(jù)顯示模塊���。
采用視覺(jué)檢測(cè)技術(shù)的注塑件瑕疵實(shí)時(shí)檢測(cè)系統(tǒng)是注塑制造過(guò)程自主感知系統(tǒng)的典型代表����。該系統(tǒng)以注 塑生產(chǎn)的零件為對(duì)象����,對(duì)注塑離散制造過(guò)程中的產(chǎn)品數(shù)據(jù)高精度瑕疵樣本分析�����,采用機(jī)器視覺(jué)檢測(cè)技術(shù)�,對(duì)生產(chǎn)中產(chǎn)品的瑕疵進(jìn)行準(zhǔn)確定位與瑕疵識(shí)別�����。該技 術(shù)原理框圖如圖2所示。
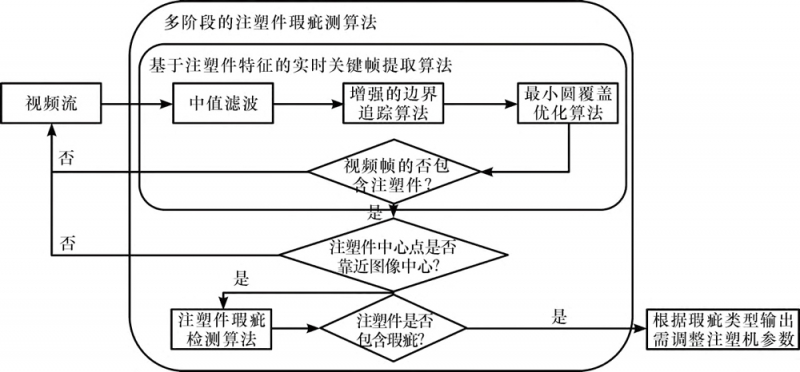
YOLO全稱youonlyLookonce��,是一種卷積神經(jīng)網(wǎng)絡(luò)YOLO是由JosephRedmon繼FasterR-CNN之后提出的��,創(chuàng)造性地將候選區(qū)和目標(biāo)檢測(cè)這兩個(gè)階段合二為一,實(shí)現(xiàn)了保持高精度的前提下對(duì)整張圖片和視頻的實(shí)時(shí)檢測(cè)[6-7]�。但是標(biāo)準(zhǔn)YOLOV5n算法無(wú)法有效提取困難樣例缺角和缺料的情況[8-10]��,提出改進(jìn)型YOLOV5n的注塑件瑕疵檢測(cè)算法����,分別對(duì)其下采樣結(jié)構(gòu)、特征提取模塊和檢測(cè)頭進(jìn)行改進(jìn)���。首先利用最大池化層能凸顯紋理特征和平均池化層保留上下文關(guān)系、減少無(wú)用信息的原理提出了新的下采樣結(jié)構(gòu) Respool和InceptionAB�。然后�����,利用高效長(zhǎng)距離網(wǎng)絡(luò)架構(gòu)的堆疊模式��,結(jié)合DenseNet的連接方式把shuffle模塊連接在一起�,形成了高效長(zhǎng)距離shuffle特征提取模塊ELSBELSB將淺層特征復(fù)用�����,有效提取瑕疵的邊緣特征,并減少參數(shù)量和計(jì)算量��。最后提出了結(jié)合SE注意力機(jī)制的解耦檢測(cè)頭DCH-SE,有效地提升了回歸器和分類器的檢測(cè)能力����,平衡了召回率和準(zhǔn)確率算法流程如圖3所示當(dāng)實(shí)時(shí)關(guān)鍵幀提取算法檢測(cè)到注塑件中心點(diǎn)坐標(biāo)接近整個(gè)圖像的中心時(shí),則判斷當(dāng)前幀為關(guān)鍵幀��,然后將關(guān)鍵幀輸入到注塑件瑕疵檢測(cè)算法中�����。實(shí)際檢測(cè)效果如圖4所示���,分別采用YOLOV5n基準(zhǔn)算法�、Respool+ELSB+DCH-SE和InceptionAB+ELSB+DCH-SE算法對(duì)開(kāi)關(guān)面板的縮水、缺角和臟點(diǎn)缺陷進(jìn)行檢測(cè),改進(jìn)后算法的檢測(cè)效果遠(yuǎn)好于基準(zhǔn)算法����。通過(guò)以上改進(jìn)�����,提升了8.9%的mAP值����,使算法兼具計(jì)算效率和檢測(cè)精度。
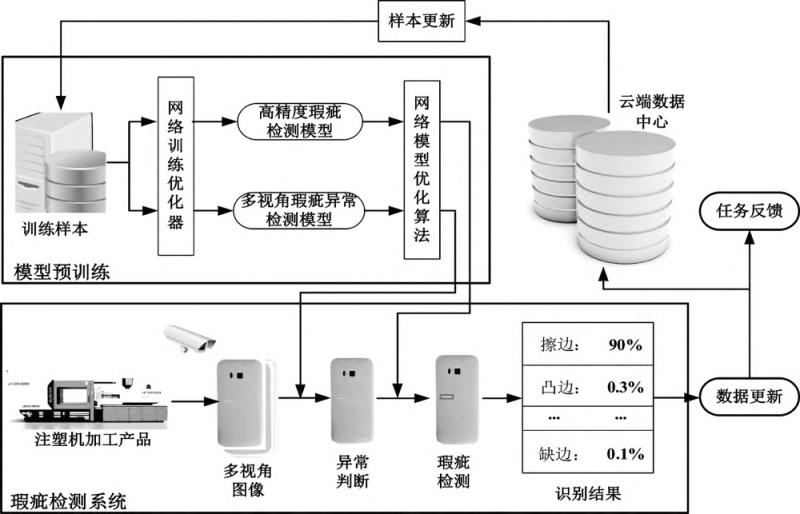
圖2注塑產(chǎn)品質(zhì)量的機(jī)器視覺(jué)感知技術(shù)
圖3算法流程圖
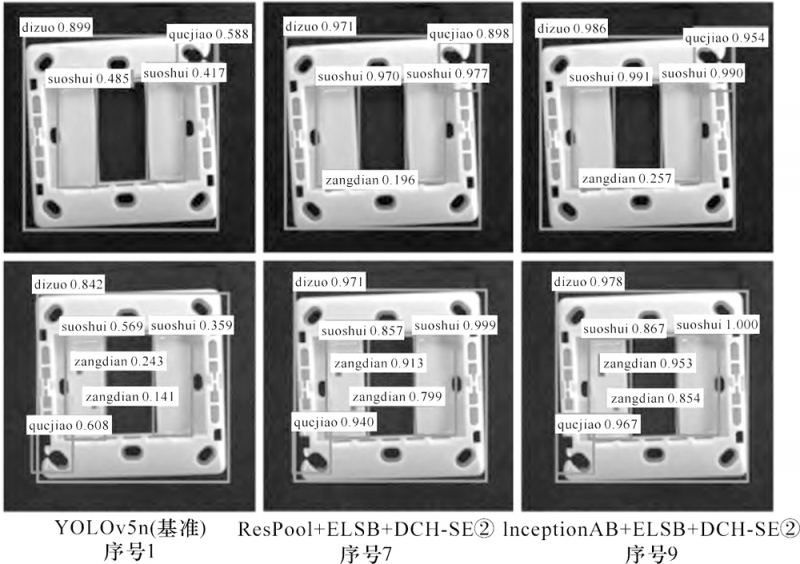
圖4瑕疵檢測(cè)算法效果圖
3 注塑機(jī)離散制造過(guò)程數(shù)據(jù)分析
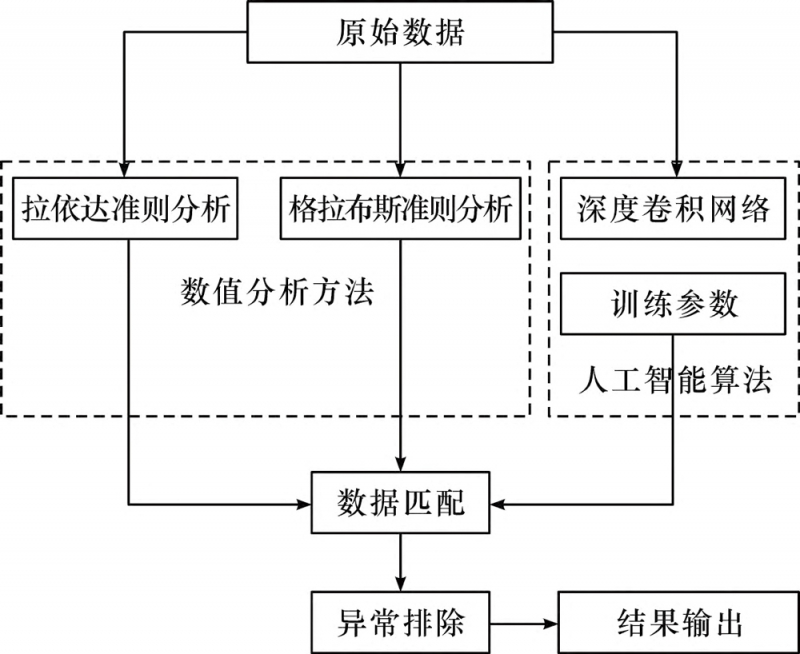
通過(guò)對(duì)注塑離散生產(chǎn)過(guò)程的數(shù)據(jù)特點(diǎn)分析���,提出的數(shù)據(jù)分析與優(yōu)化過(guò)程主要包括裝備管理����、狀態(tài)檢 測(cè)��、故障診斷���、狀態(tài)預(yù)測(cè)����、健康評(píng)估、保障決策等過(guò)程���。在注塑離散制造過(guò)程中�����,注塑過(guò)程中產(chǎn)生的重要數(shù)據(jù)包括物料進(jìn)出量、物料進(jìn)出速率���、射膠速率、物料溫度�����、注塑成型狀態(tài)參數(shù)�����、實(shí)時(shí)工藝參數(shù)���、模具參數(shù)等。獲取到原始數(shù)據(jù)后�,數(shù)據(jù)自診斷過(guò)程分別利用了數(shù)值分析方法(包括拉依達(dá)準(zhǔn)則和格拉布斯準(zhǔn)則)和人工智能方法(深度卷積神經(jīng)網(wǎng)絡(luò))進(jìn)行分析,處理結(jié)果通過(guò)數(shù)據(jù)匹配過(guò)程進(jìn)行進(jìn)一步篩選����,目的是排除異常數(shù)據(jù)。最后將診斷數(shù)據(jù)傳送至下一環(huán)節(jié)(成型工藝參數(shù)自適應(yīng)分析)��,如圖5所示��。
圖5數(shù)據(jù)自診斷過(guò)程示意圖
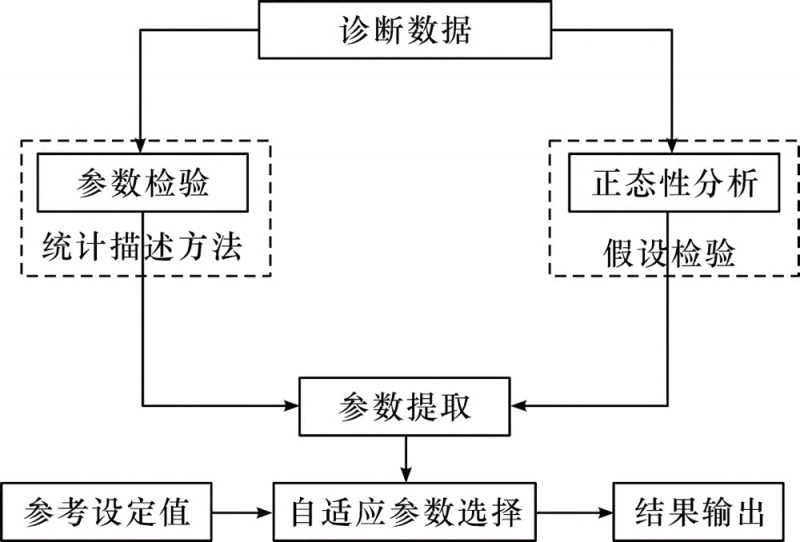
注塑離散生產(chǎn)過(guò)程中,異常數(shù)據(jù)將對(duì)系統(tǒng)監(jiān)測(cè)和進(jìn)程造成極大干擾���,甚至出現(xiàn)事故。離散分布的工業(yè)大數(shù)據(jù)也將造成控制層主控單元的巨大計(jì)算負(fù)荷���。數(shù)據(jù)自診斷過(guò)程能夠有效提出測(cè)量環(huán)節(jié)中因?yàn)閭鞲衅髡`差而產(chǎn)生的異常數(shù)據(jù),從源頭上避免事故���。所提出的注塑成型工藝參數(shù)自適應(yīng)分析過(guò)程如圖6所示�����。
圖6成型工藝參數(shù)自適應(yīng)分析過(guò)程示意圖
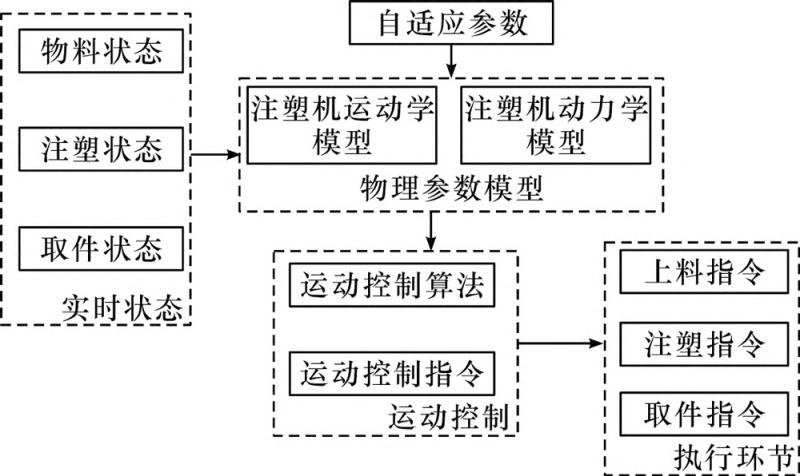
自適應(yīng)調(diào)整后的參數(shù)數(shù)據(jù)需要進(jìn)行數(shù)據(jù)轉(zhuǎn)換處理���,形成運(yùn)動(dòng)控制指令��,其生成過(guò)程如圖7所示�。其中��,注塑機(jī)運(yùn)動(dòng)學(xué)模型和動(dòng)力學(xué)模型是根據(jù)注塑機(jī)機(jī)身物理參數(shù)進(jìn)行建模和設(shè)定的,具有不變性��。物料狀態(tài)����、注塑狀態(tài)�����、取件狀態(tài)數(shù)據(jù)反饋的是當(dāng)前生產(chǎn)線上的實(shí)時(shí)狀態(tài),其主要作用是與自適應(yīng)參數(shù)進(jìn)行匹配����,形成偏差信號(hào)。偏差信號(hào)在運(yùn)動(dòng)控制過(guò)程中作為輸 入����,轉(zhuǎn)化為注塑機(jī)能夠識(shí)別和執(zhí)行的運(yùn)動(dòng)指令,從而精確地執(zhí)行上料���、注塑、取件等指令�����。
圖7運(yùn)動(dòng)指令生成環(huán)節(jié)示意圖
4 注塑離散制造過(guò)程智能控制
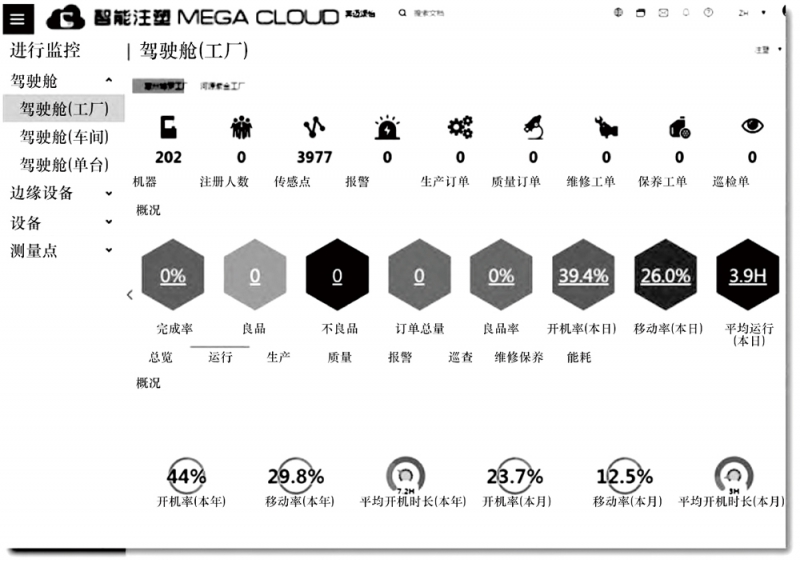
根據(jù)系統(tǒng)要求提出的注塑生產(chǎn)線智能控制系統(tǒng)模型主要由鎖模機(jī)構(gòu)��、射膠機(jī)構(gòu)、動(dòng)力系統(tǒng)��、控制系統(tǒng)����、塑化系統(tǒng)等組成。本文注塑機(jī)智能控制系統(tǒng)包括注塑產(chǎn)業(yè)多類型生產(chǎn)任務(wù)自組織調(diào)度���、復(fù)雜工藝參數(shù)自優(yōu)化配置、裝備控制策略自適應(yīng)調(diào)整等��。為了實(shí)現(xiàn)注塑產(chǎn)業(yè)離散制造智能感知與控制關(guān)鍵技術(shù)的應(yīng)用����,初步搭建統(tǒng)一信息化平臺(tái),如圖8所示�����。
圖8智能控制系統(tǒng)統(tǒng)一信息化平臺(tái)
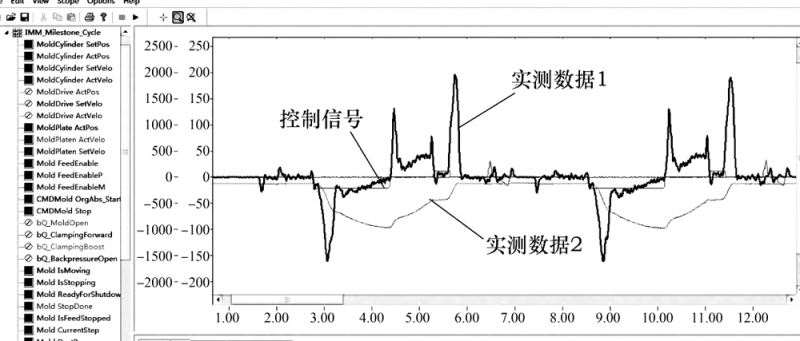
智能控制系統(tǒng)的智能化實(shí)時(shí)診斷與決策過(guò)程如圖9所示(圖示為某一指標(biāo))�����,該模塊包含多項(xiàng)主要參數(shù)的顯示,包括設(shè)定的參考曲線����,以及實(shí)時(shí)數(shù)據(jù)走勢(shì)曲線���。模塊內(nèi)包含統(tǒng)計(jì)性分析與曲線擬合算法,能夠精確地反映實(shí)時(shí)數(shù)據(jù)��。根據(jù)統(tǒng)計(jì)性分析(如正態(tài)分析,參數(shù)檢驗(yàn))�,可計(jì)算并顯示實(shí)時(shí)數(shù)據(jù)與參考曲線的誤差�����,以及系統(tǒng)建議的修正值。
圖9智能化實(shí)時(shí)診斷與決策過(guò)程示意圖
5 結(jié)論
本文對(duì)注塑離散制造過(guò)程的自主感知與控制關(guān)鍵技術(shù)進(jìn)行了研究�,對(duì)注塑裝備各功能模塊的工藝結(jié)構(gòu)進(jìn)行了升級(jí)改造�,搭建了硬件測(cè)試平臺(tái)。以開(kāi)關(guān)面板的缺陷瑕疵為主要在線采集檢測(cè)對(duì)象�,建立視覺(jué)檢測(cè)系統(tǒng)����,改進(jìn)和優(yōu)化注塑件缺陷檢測(cè)的深度學(xué)習(xí)算法,實(shí)現(xiàn)缺陷在線采集、精準(zhǔn)定位和智能識(shí)別等功能����。通過(guò)上位機(jī)接收視覺(jué)檢測(cè)缺陷信息,結(jié)合注塑經(jīng)驗(yàn)參數(shù)�����,完成智能調(diào)參工藝��,實(shí)現(xiàn)保壓切換位置、保壓時(shí)間��、當(dāng)前模數(shù)等注塑參數(shù)自主感知與注塑工藝參數(shù)自 適應(yīng)修正�。對(duì)注塑離散生產(chǎn)過(guò)程的數(shù)據(jù)進(jìn)行了分析和 優(yōu)化��,研究了數(shù)據(jù)自診斷���,工藝參數(shù)自適應(yīng)分析和運(yùn)動(dòng)控制指令生成過(guò)程�����。建立了注塑生產(chǎn)線智能控制系統(tǒng)模型�,搭建CPS系統(tǒng)及云平臺(tái)�����,初步將智能感知調(diào)節(jié)程序融入注塑生產(chǎn)��。
參考文獻(xiàn)
[1]葛妍嬌·基于智能感知網(wǎng)的離散制造車間物料配送關(guān)鍵技術(shù)研究[D].南京:南京航空航天大學(xué),2023.
[2]曹銀平·大數(shù)據(jù)平臺(tái)注塑裝備行業(yè)實(shí)現(xiàn)智能化轉(zhuǎn)型的關(guān)鍵[J].自動(dòng)化博覽��,2017��,34(2):58-60.
[3]吳偉·信息時(shí)代下注塑產(chǎn)業(yè)的改革與發(fā)展[J].石化技術(shù)����,2018�����,25(8):205.
[4]陶永亮����,姚科·注塑過(guò)程控制技術(shù)和智能化發(fā)展趨勢(shì)[J].工業(yè)控制計(jì)算機(jī)����,2019����,32(4):17-20.
[5]何和智�����,高琦,張濤·國(guó)內(nèi)外大型注塑機(jī)技術(shù)發(fā)展動(dòng)態(tài)綜述[J].中國(guó)塑料�����,2022,36(11):140-149.
[6]曾凱����,李響���,賈建梅,等·基于YOL.ov3-spp的缺陷檢測(cè)優(yōu)化模型[J].計(jì)算機(jī)系統(tǒng)應(yīng)用�,2022��,31(2):213219.
[7]劉志文·基于機(jī)器視覺(jué)的注塑制品缺陷檢測(cè)研究[D].北京:北京化工大學(xué)��,2022.
[8]文生平,洪華鋒����,舒凱翔·精密注塑手機(jī)外殼表面缺陷視覺(jué)檢測(cè)系統(tǒng)設(shè)計(jì)[J].塑料工業(yè),2017�,45(9):53-56.
[9]向玉開(kāi),雷林建�,張悅·基于計(jì)算機(jī)視覺(jué)的注塑零件表面缺陷在線檢測(cè)研究[J].塑料工業(yè)���,2019����,47(sl):87-90�����,97.
[10]陳儒俠�,任德均�����,嚴(yán)扎杰����,等·基于機(jī)器視覺(jué)的注塑空瓶缺陷檢測(cè)系統(tǒng)[J].科技與創(chuàng)新����,2018����,6(19):13-15.













 玻纖含量對(duì)長(zhǎng)玻纖...
玻纖含量對(duì)長(zhǎng)玻纖... 鈣鈦礦薄膜的均勻...
鈣鈦礦薄膜的均勻... 用于光伏板靜電除...
用于光伏板靜電除... 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入...













