武杰, 秦輝
(中國(guó)電子科技集團(tuán)公司第二研究所���, 山西 太原 030024)
摘要:為了提高生產(chǎn)效率����,降低生產(chǎn)成本��,自動(dòng)化設(shè)備漸漸取代了人工手動(dòng)機(jī)臺(tái)���。全自動(dòng) FOG(FPC On Glass)邦定機(jī)是實(shí)現(xiàn)柔性電路 FPC 和液晶玻璃或者觸摸屏機(jī)械連接邦定的一種自動(dòng)化設(shè)備�����。因此����,重點(diǎn)介紹了霍夫變換算法在 FPC 上料機(jī)中的應(yīng)用,視覺系統(tǒng)在 FPC 上料機(jī)當(dāng)中的應(yīng)用��,將極大地提高 FPC 上料機(jī)的上料效率�����。
關(guān)鍵詞:FOG邦定機(jī)���、FPC上料機(jī)、霍夫變換
中圖分類號(hào):TP 391.41 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1003-773X(2018)06-0169-02
引言
FOG 邦定機(jī)主要由LCD 上料機(jī)����,ACF 邦定、預(yù)壓邦定�、主壓邦定以及FPC 上料機(jī),自動(dòng)下料部分組成��。整個(gè)設(shè)備邦定的工藝流程是:先將 ACF 導(dǎo)電膜貼附在液晶玻璃的 ITO 端子處;然后通過機(jī)械手搬運(yùn)到預(yù)壓部分�����,依靠視覺系統(tǒng)將液晶玻璃與 FPC 采用低溫���,小壓力黏附在一起����;最后在主壓?jiǎn)卧?����,采用高溫�����、大壓力�����、長(zhǎng)時(shí)間的方式將黏接處的導(dǎo)電粒子壓碎并固化����,既實(shí)現(xiàn)了單方向?qū)щ姡謱⒁壕РAc FPC 邦定在一起�。其中,F(xiàn)PC 上料的作用是將 FPC 搬運(yùn)到FOG邦定機(jī)預(yù)壓部分����。FPC上料機(jī)最先采用的是機(jī)械定位方式,及把 FPC 放入提前刻好凹槽的料盤當(dāng)中��,算好料盤行列數(shù)和間隔距離����,然后控制機(jī)械手自動(dòng)走到每個(gè)定位位置,實(shí)現(xiàn)抓取上料�����。在實(shí)際生產(chǎn)當(dāng)中��,由于人工擺放�,以及料盤規(guī)格存在誤差,經(jīng)常出現(xiàn)機(jī)械手走位不準(zhǔn)確���,吸取位置到了 FPC 邊緣或者到了料盤凸起部分,造成上料失敗����,引起設(shè)備報(bào)警����,暫停生產(chǎn)�����。本文將介紹一種霍夫變換算法�����,用視覺識(shí)別取代機(jī)械定位���,可極大提升 FPC 上料機(jī)的取料成功率�。
1�����、數(shù)學(xué)模型與算法
霍夫變換是現(xiàn)在視覺系統(tǒng)中常用的一種算法���, 它可以很好的對(duì)直線和曲線圖形進(jìn)行識(shí)別�����。這一算法具有對(duì)局部缺陷不敏感�����、隨機(jī)噪聲魯棒性強(qiáng)�、適合并行處理等特點(diǎn),并且已經(jīng)廣泛應(yīng)用于計(jì)算機(jī)視覺����、圖像處理、機(jī)器視覺等領(lǐng)域 [1]��。下面是最小二乘法的霍夫變換的推導(dǎo)由來[2]�����。任意一個(gè)圓可由圓心坐標(biāo)(A�����,B)和半徑R表示為:
(x- A)2+(y- B)2=R2 . (1)
變換一下公式(1)�,我們可以得到:
R2=x2- 2Ax+A2+y2- 2By+B2 . (2)
假設(shè) a=- 2A,b=- 2B 以及 c=A2+B2- R2�,所以,圓參數(shù)可以表示為:A=a/- 2�����,B=b/- 2��,�。從而得到:
x2+y2+ax+by+c=0 . (3)
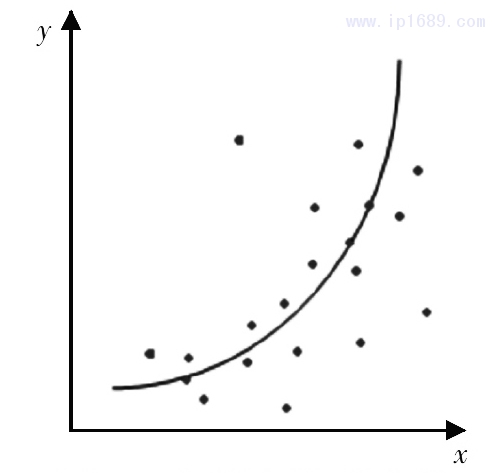
如圖 1 所示,如果圖上一系列小點(diǎn)集的坐標(biāo)分別為({ X1�����,Y1)���,(X2�����,Y2)�,…�����,(Xn�����,Yn)},這些點(diǎn)到圖中圓弧圓心的距離為 dn��,根據(jù)公式(1)(3)���,可以得到:
dn2- R2=(X - A)2+(Ya - B)2- R2=X n2+Y 2+aXn +bYn +c . (4)
圖1 圓弧周邊的點(diǎn)集
假設(shè)一個(gè)新方程:
那么 F(a��,b�����,c)的偏導(dǎo)數(shù)為 0:
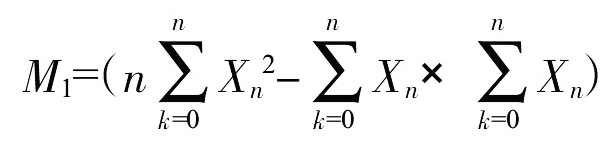
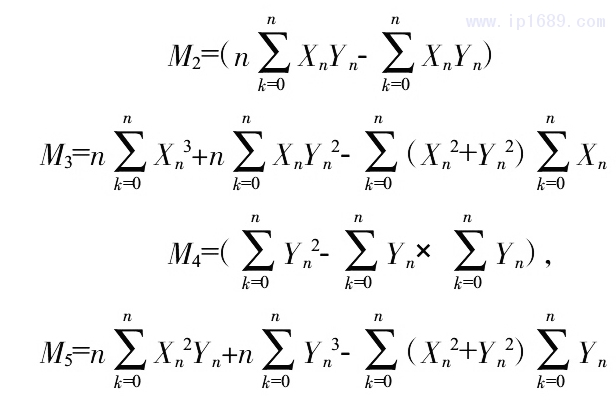
假設(shè):
解方程(6)(7)(8)并帶入 M1�����、M2�����、M3��、M4�����、M5�,可得:
這樣通過霍夫變換,我們可以用 a���、b、c 三個(gè)設(shè)定參數(shù)來表示圓心坐標(biāo)以及圓半徑�。
2、流程設(shè)計(jì)與實(shí)現(xiàn)
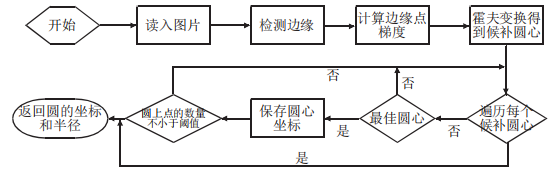
首先�,相機(jī)在其視野內(nèi)拍攝圖像,程序會(huì)將拍到的圖片由彩色圖片自動(dòng)轉(zhuǎn)換成為灰度圖���,利用邊緣檢測(cè)索貝爾算子�����,找出邊緣點(diǎn)[3] ����。然后通過計(jì)算公式算出每個(gè)邊緣點(diǎn)在 X��、Y 兩個(gè)方向上的梯度�,并且應(yīng)用霍夫變換,可以得到候補(bǔ)圓心點(diǎn)的坐標(biāo)���,統(tǒng)計(jì)不同半徑的頻次�,將所有候補(bǔ)圓心由得票多少進(jìn)行排序。最后�,通過分析圓存在概率以及其峰值,遍歷每個(gè)候補(bǔ)圓心點(diǎn)���,得票數(shù)高以及滿足固定靶標(biāo)參數(shù)的閾值候補(bǔ)圓心可以被當(dāng)做是最佳圓心��,返回靶標(biāo)圓的坐標(biāo)[4]���。流程圖如圖 2。為了適應(yīng)高精度的要求���,我們將實(shí)際測(cè)量好的靶標(biāo)圓心的半徑作為閾值�����,這樣可以快速排除大部分不在檢測(cè)范圍內(nèi)的圓半徑�。
圖 2 霍夫變換檢測(cè)圓心的流程圖
3.���、實(shí)驗(yàn)結(jié)果與實(shí)際應(yīng)用
為了評(píng)估該程序改進(jìn)算法的準(zhǔn)確率����,我們選取了 50 張擁有真實(shí)圓數(shù)據(jù)的的圖片,其中(a����,b,r)分別表示為圓心 X�、Y 向坐標(biāo)以及圓半徑長(zhǎng)度。根據(jù)這50 組實(shí)驗(yàn)數(shù)據(jù)����,我們可以得到該程序檢測(cè)出的目標(biāo)圓的平均誤差值為(0.068��,0.023�����,0.133)�;誤差的標(biāo)準(zhǔn)偏差為(0.000 367,0.000 178����,0.001 535)。此程序的運(yùn)行精度完全可以滿足 FPC 上料機(jī)上料位置 0.1 以內(nèi)的誤差要求����。
圖 3 所示為一種常見的小尺寸 FPC�����,其中間部分有很明顯的 logo 可以被當(dāng)做靶標(biāo)供攝像頭識(shí)別�,靶標(biāo)的圓心所在位置也有利于機(jī)械手進(jìn)行抓取���。圖4 為識(shí)別結(jié)果并且返回圓心坐標(biāo)位置及其半徑�����。
小尺寸FPC(左) 檢測(cè)結(jié)果(右)
如果相機(jī)視野大���,在一個(gè)視野中,會(huì)出現(xiàn)多個(gè)FPC����,該程序可以將視野內(nèi)的靶標(biāo)全部標(biāo)出并返回給機(jī)械手,機(jī)械手判斷最近位置進(jìn)行抓取�,提高上料效率,如圖 5���;該程序也可以將視野中的靶標(biāo)進(jìn)行最優(yōu)排序����,返回最佳靶標(biāo)位置,這樣可以保證上料精度及準(zhǔn)確率����,如圖 6。
返回視野中所有圓心(左) 返回最佳圓心(右)
在實(shí)際生產(chǎn)中�,也會(huì)遇到一些異形 FPC,拖著長(zhǎng)長(zhǎng)尾巴的 FPC 也是較常見的��,如圖 7 所示�����,為了抓取牢靠����,在 FPC 上料機(jī)上增加輔助吸嘴的機(jī)械結(jié)構(gòu)來保證抓取穩(wěn)固��。該程序可以根據(jù)實(shí)際需要���,返回機(jī) 械手最佳單一坐標(biāo)�,或者同時(shí)返回靶標(biāo)圓心位置和輔助靶標(biāo)圓心位置��,如圖 8。
異形FPC 返回最佳圓心(左) 返回圓心和輔助圓心(右)
4�、結(jié)語
FPC 自動(dòng)上料機(jī)大大提高了全自動(dòng) FOG 生產(chǎn)設(shè)備的自動(dòng)化程度�,也減少了大量的人力成本,提高了生產(chǎn)效率���。視覺系統(tǒng)在 FPC 上料機(jī)中的應(yīng)用�����,進(jìn)一步提升了自動(dòng)化設(shè)備的技術(shù)水平����,有著巨大的經(jīng)濟(jì)效益�����。
參考文獻(xiàn)
[1] HK Yuen, J Princen, J Illingworth, et.al. A comparative study of Hough Transform methods for circle finding [M].Copyright 1990 Published by Elsevier B.V.���,1990.
[2]崔繼文����,譚久彬.基于約束抽樣 Hough 變換的圓輪廓快速檢測(cè)技術(shù).哈爾濱工業(yè)大學(xué)學(xué)報(bào),2005���,37(10):1 394- 1 396.
[3]胡占義�����,吳福朝.基于主動(dòng)視覺攝像機(jī)標(biāo)定方法.計(jì)算機(jī)學(xué)報(bào)�����,2002(11):1 150- 1 156
[4]David Manthey .General Least- Squares - Direct Solutions and Bundle Adjustments.Copyright:1999- 2005.




















 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入... 塑料包裝材料的減...
塑料包裝材料的減... 汽車功能鍵觸摸蓋I...
汽車功能鍵觸摸蓋I... 高性能注塑聚丙烯...
高性能注塑聚丙烯...













