-

- 供應(yīng)商新聞 /li>
- 注塑加工/li>
- 薄膜與片材擠出加工/li>
- 管材與型材擠出加工/li>
- 吹塑加工/li>
- 市場(chǎng)行情/li>
- 政策法規(guī)/li>
- 原輔材料/li>
- 其他機(jī)械/li>
- 人物專訪/li>
- 展會(huì)信息/li>
- 展會(huì)報(bào)道/li>
- 展會(huì)新聞稿/li>
- 合作展會(huì)/li>
- 雜志類目(編輯計(jì)劃)/li>
- 雜志類目(投稿服務(wù))/li>
- 全站底部/li>
- 雜志類目(編輯簡(jiǎn)介)/li>
- 雜志類目(編輯計(jì)劃)/li>
- 視頻/li>
- 管窺擠出精品/li>
- 默認(rèn)分類/li>
- 求購(gòu)
- 供應(yīng)
- 視頻
- 宣傳矩陣
-















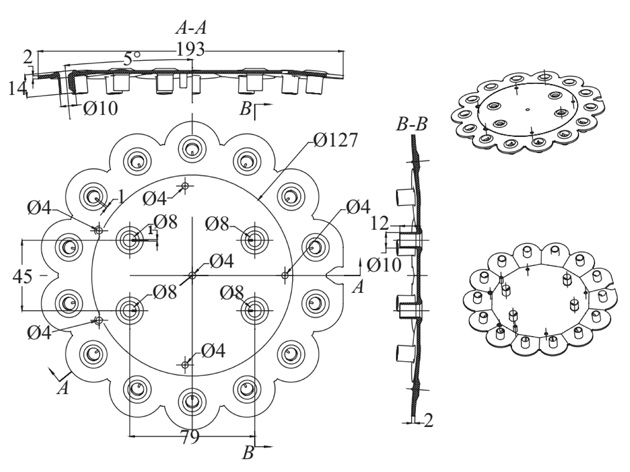 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入...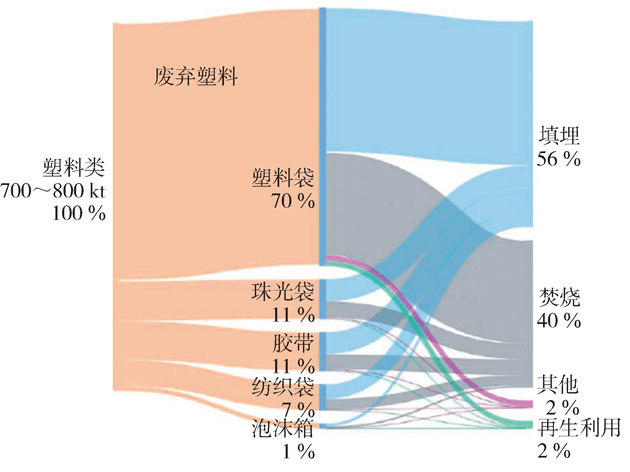 塑料包裝材料的減...
塑料包裝材料的減...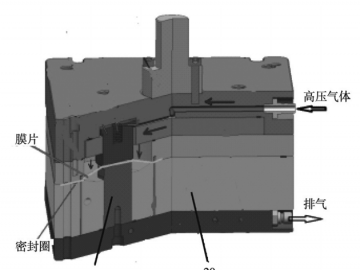 汽車功能鍵觸摸蓋I...
汽車功能鍵觸摸蓋I...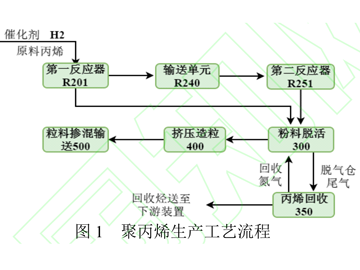 高性能注塑聚丙烯...
高性能注塑聚丙烯...













