<del id="wak0y"></del>
<strike id="wak0y"></strike>
富強(qiáng)鑫五十周年慶典:鑫業(yè)五十 創(chuàng)新不止
2024泰國國際橡塑展
鈣鈦礦薄膜的均勻結(jié)晶和埋底鈍化策略:刷新全鈣鈦礦疊層光伏組件紀(jì)錄效率
拓斯達(dá)科技注塑裝備產(chǎn)品線總經(jīng)理-楊雙保
威猛巴頓菲爾科技(東莞)有限公司總經(jīng)理-劉毅
科技和產(chǎn)業(yè)變革將推動(dòng)行業(yè)加快轉(zhuǎn)型發(fā)展
匯聚權(quán)威專家 推動(dòng)工程塑料高質(zhì)量發(fā)展——第九屆中國國際工程塑料產(chǎn)業(yè)創(chuàng)新大會(huì)








 (1)式中:
(1)式中:
 (2)式中:
(2)式中: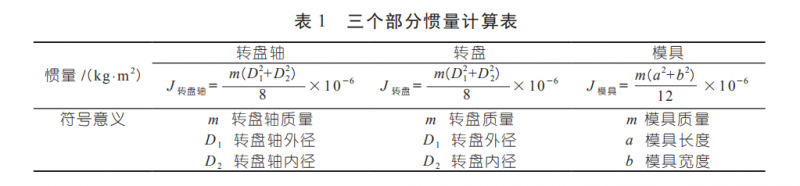
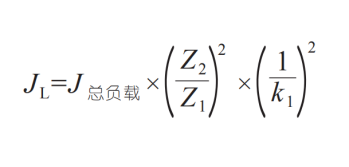 (4)
(4)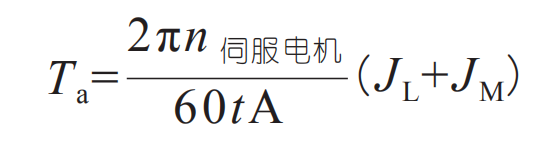 (5)
(5)















 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入... 塑料包裝材料的減...
塑料包裝材料的減... 汽車功能鍵觸摸蓋I...
汽車功能鍵觸摸蓋I... 高性能注塑聚丙烯...
高性能注塑聚丙烯...





